前期准备
装机工艺
在硬件本身没有重大设计缺陷的情况下,装机工艺要可靠,机架组装到位,螺丝拧紧,焊接牢靠,线材整理清晰。
飞控和电调的设置
开启对应固件的双向Dshot,设置合适的PWM频率
以上两步是为了确保飞控能获取真实的飞机信息,包括IMU信息,电机实时工作状态信息等,以确保进入后续流程的信号都是正确的。尤其是机架设计缺陷和装机不规范带来的杂乱信号波形,几乎无法靠后续的软件滤波去除,所以这方面要提前注意。
黑匣子数据设置
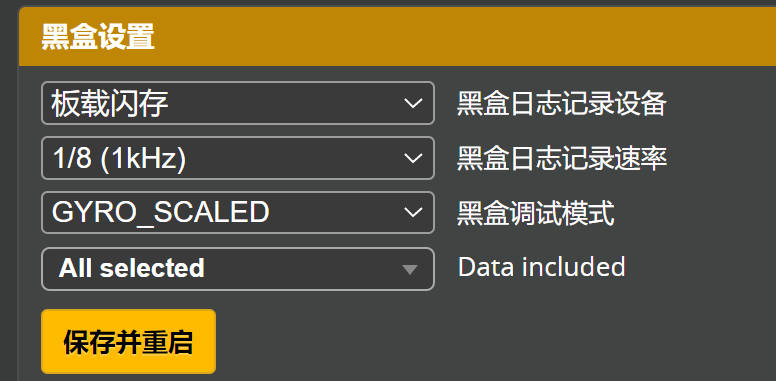
记录速率选择1KHz,可采样最高500Hz频率的数据
调试模式选择GYRO_SCALED(陀螺仪测量)
黑匣子数据是每次上电,解锁一次一个数据,还有一个包含所有数据的文件。
调参基本流程
穿越机的电机控制本质上是一个闭环PID控制系统,主控获取IMU信号,进行一定的滤波处理,获得有用的信息,然后进入PID循环进行运算,用于控制电机进行姿态响应。
所以在进行PID调节之前,要先调滤波,确保主控获取的都是有用的信号,这样PID的调整才是有意义的。
滤波主要看Blackbox Explorer软件的噪声图,PIDTOOL BOX也有噪声方面的功能。
PID主要看PIDTOOL BOX生成的阶跃相应曲线。
评论区