前言
滤波是对有效信号的提取,对无效信号的过滤,IMU的信号采集是非常敏感的,各种飞行过程中的震动都会被IMU采集,而飞行器产生震动的原因很多,包括桨叶震动,机架共振,天线摇晃等,这些信号都会传递给IMU并进入PID运算,最后输出给电机,但是因为电流变化是需要时间的,电机无法及时响应频率过高的信号,电能无法及时转化为机械能,就会造成电机发热,抽风。所以要通过BF固件内置的一系列滤波器对无效信号进行滤除,只保留有效信号进入PID运算。
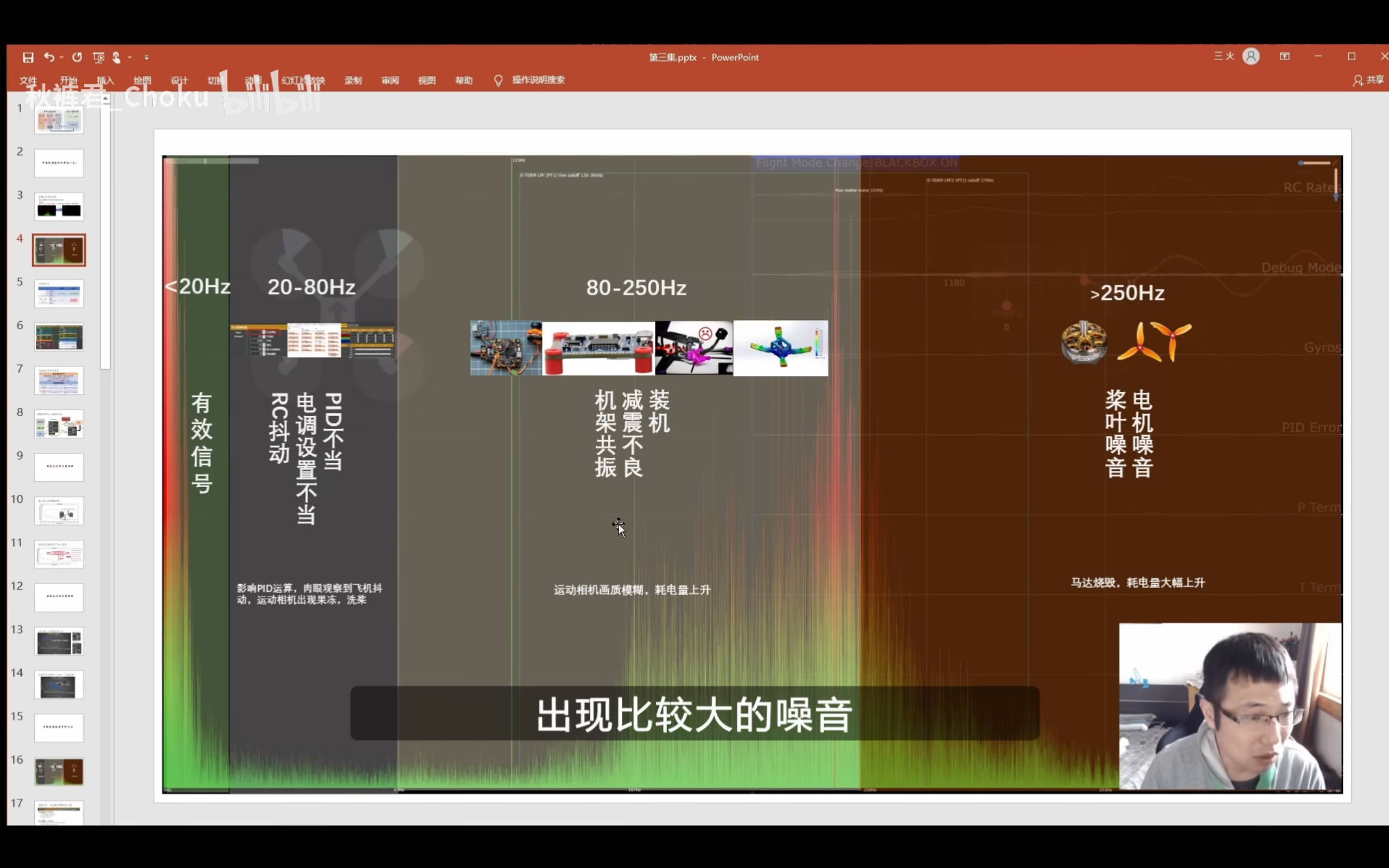
实际上,能反映飞机姿态的有效信号频率多在30Hz以下,高于30Hz的基本都是杂波。这些杂波往往集中分布在某些频率段,而每个频率段杂波产生的原因又往往是固定的,所以可以针对性的去排查问题。
特别值得指出的是,一个好的硬件组合,尤其是机架和电机的选择,会给滤波工作带来很大帮助。合适的硬件配置,几乎不用再专门去调整滤波器,默认的滤波配置已经能带来十分优秀的滤波效果。甚至说,可以在默认的基础上,在不影响滤波效果的前提下,尝试关闭部分滤波器以求获得更低的延迟。
滤波器介绍
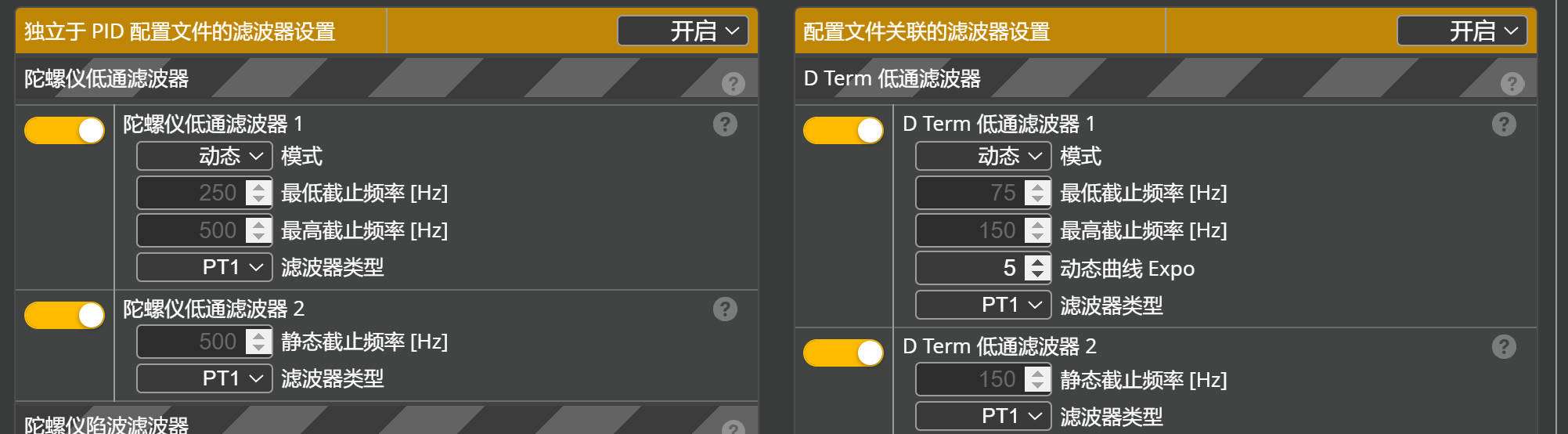
BF中的滤波器整体分为两种,低通滤波器和陷波器滤波器,每种又分为固定频率的和动态的,有的滤波器还有多个。
具体有:
- 陀螺仪低通滤波器
- D Term低通滤波器
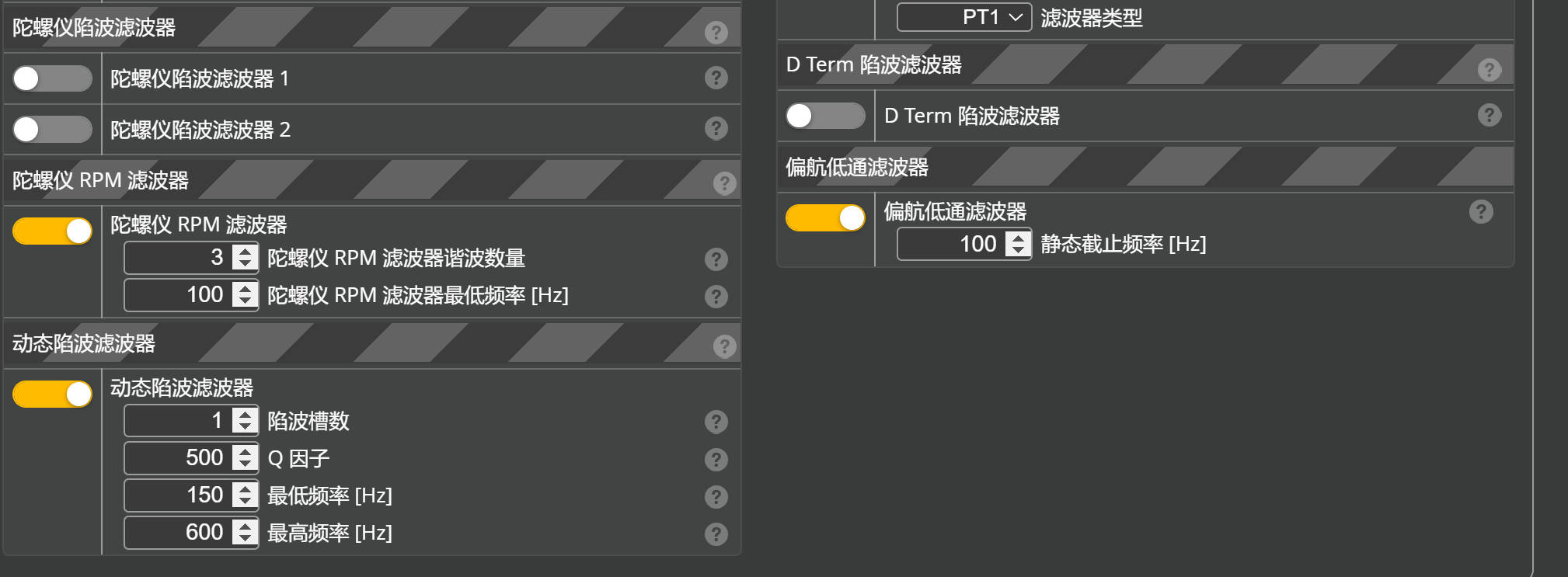
- 陀螺仪RPM滤波器(动态陷波滤波器)
- 陀螺仪陷波滤波器
- D Term陷波滤波器
- 动态陷波滤波器
- 偏航低通滤波器

关于每种滤波器的具体作用、各个参数的意义和具体调整方法,本来我想按照自己的学习理解来详细写一写的,但是因为个人的时间安排计划,现在包括在未来相当一段时间我都无暇再去深究这方面的知识,所以先把这个视频链接放上来RPM/低通滤波/陷波/动态滤波【KZ068】,我认为视频中的解释已经相当专业而且通俗易懂了,待日后我有时间再来完善滤波这方面的内容。
基本调整顺序:RPM滤波器——>陷波滤波器——>低通滤波器
开了RPM滤波之后可以关闭第一个低通滤波器
参考
【系列教程】《穿越机滤波详解 八集全》:RPM/低通滤波/陷波/动态滤波【KZ068】_哔哩哔哩_bilibili
BetaFlight 4.3调参指南 理解BF4.3滤波
【Betaflight 4.3 教程】颠覆你对穿越机滤波认知 解决90%发热和洗桨问题(3/8)_哔哩哔哩_bilibili
评论区