前言
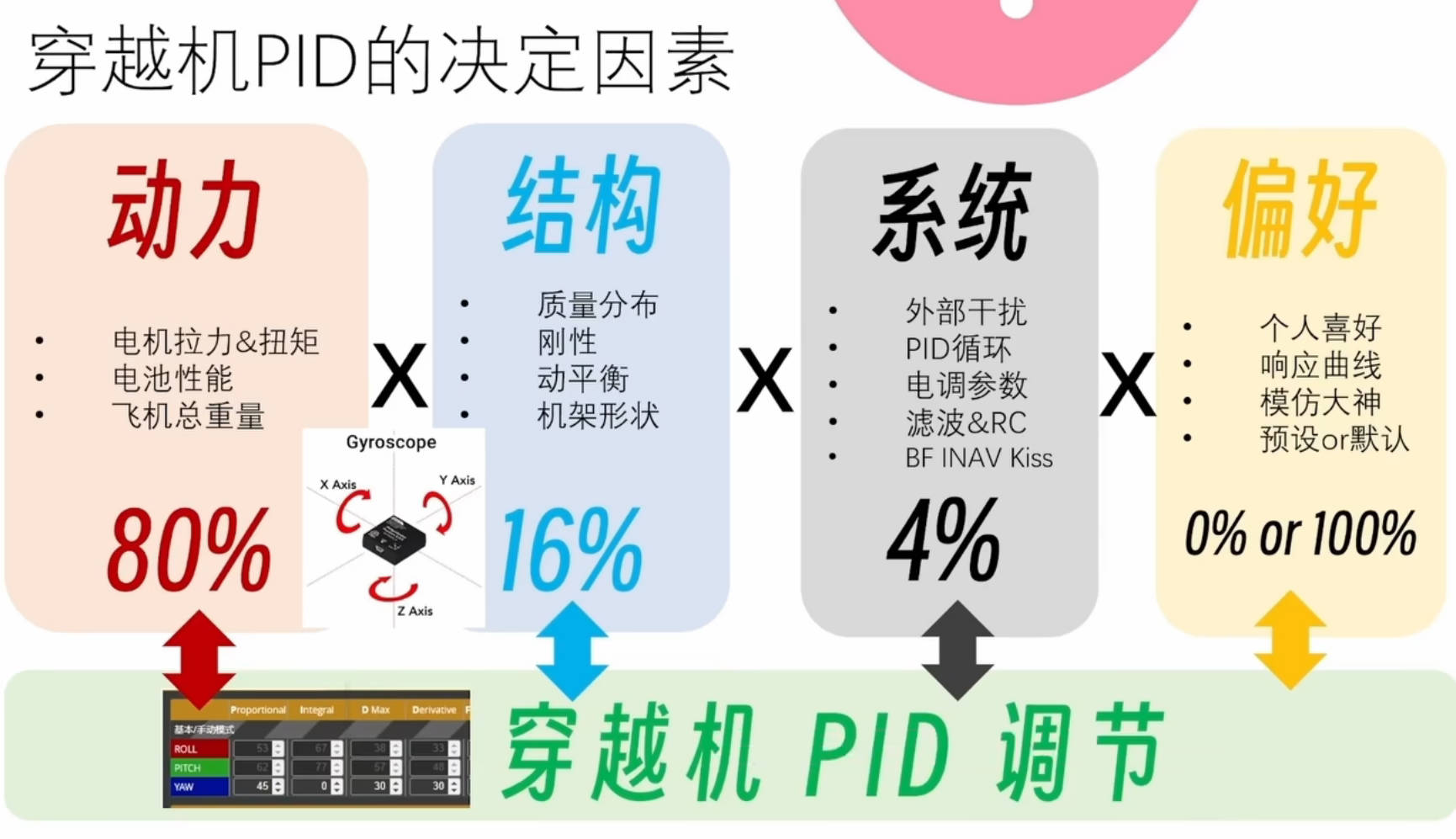
PID的调整是为了让飞手对飞机有更好的控制力,那么一套好的PID参数应该是怎么样的?我认为应该从电机发热,过冲程度,抖动,洗桨,姿态响应时间等这些方面来判断,总体来说就是一个“手感”问题,同时这也是一个非常主观的问题,每个人习惯的、认为“好飞”的感觉都是不一样的。
刚开始学习调参的时候可以以阶跃响应曲线趋于完美状态为目标去学习,理解各个参数的变化对于实际飞行的影响,充分理解之后就可以按照自己的喜好来调整了,而不必拘泥于曲线的状态。
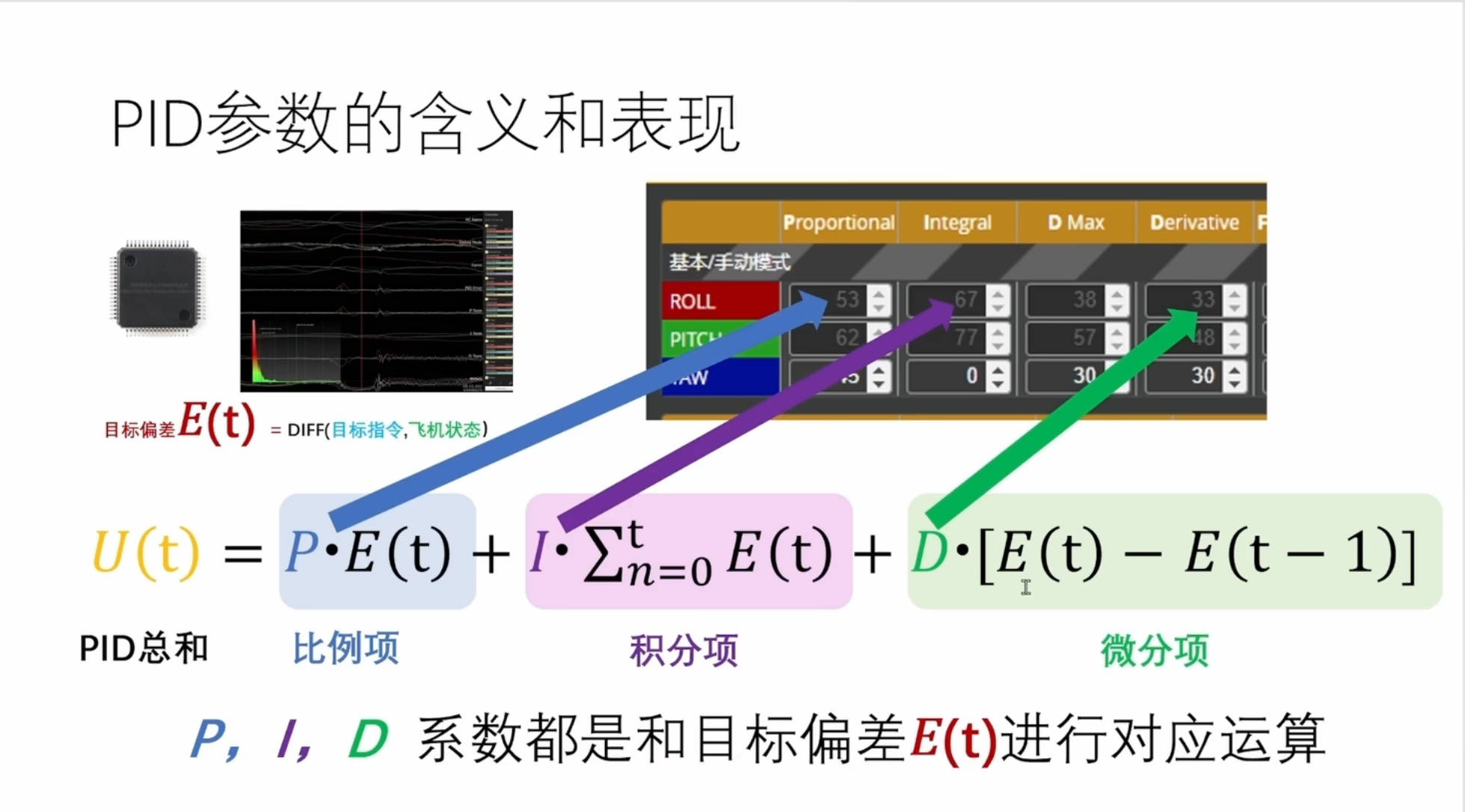
PID的含义
- P比例控制项,增加响应;
- I积分控制项,对外部干扰进行补充,减小稳态误差;
- D微分控制项,减少过冲,当飞机从当前角度接近目标角度时对P的抑制,简单理解是越接近目标角度飞机姿态变化的越慢,直到达到目标角度。在BF中体现为D值总是希望陀螺仪值不变,是一种阻尼。
要注意的是,P、D的比例往往比他们的实际数值重要的多,正如汽车的避震弹簧要有合适的软硬,飞机的迅速响应和回弹阻尼要保持一定的平衡。在同一架飞机上,这个平衡点可能有多个,也就是说,能保持较好阶跃曲线的参数组合可能有多个,但是实际的飞行手感是完全不同的,这就是为什么说一架飞机的调校会有“激进”和”保守“的说法。
P值高低对飞行效果的影响
- P值过高,P值太高会导致飞机严重超调、震颤,甚至螺旋升天。
- P值过低,当P值低了飞机往目前角度调整的速度就会变慢,直接体现就是不跟手。
- 适中P值,穿越机反应适中,飞行稳定,调整及时,飞行效果好。
I值高低对飞行效果的影响
- I值过高,导致太灵敏导致不停地调整姿态,出现比较快速的上下左右的晃,但又没有D值过低晃的那么厉害。
- I值过低,飞机会锁不住姿态,在镜头里看就是出现比较慢的上下左右的点头,感觉上飞机一直在晃。
- I值适中,穿越机能够稳定飞行,同时保持较高的飞行精度是理想的飞行状态。
D值高低对飞行效果的影响
- D值过高,会让飞机无法到达目标角度或者前半段很快后半段很慢,造成延时过高,而且
还会造成电机过热烧毁.. - D值太低,会抑制不住P值导致已经到了目标角度了还停不下来,然后再反过来往回调整。体现在飞机上就是过冲或者震荡,还有明显的洗桨现象。
- D值适中,穿越机在飞行中表现出良好的稳定性和反应速度,提高飞行效果和安全性。
阶跃曲线图像分析
由PIDTOOL BOX生成的步进阶跃响应曲线的纵轴是陀螺仪值(角速度)与Setpoint(目标角速度,来自遥控器)的比值,靠近1意味着飞机对操控的精确响应。
【待写】
PID三个参数的值变化在图像上的具体体现
Betaflight固件PID界面说明

数值和滑块
穿越机的每个轴都有一套独立的PID参数可以调节,但是在穿越机的飞行中,YAW轴的参与其实是非常少的,所以在调节PID的过程中对YAW轴的关注很少,几乎不会特别进行调整。
界面上方可以直接修改相关参数的具体数值,但是我们对数值与实际飞行之间的关系感受非常抽象,而且不同的参数步进尺度也有差别,所以一般不直接修改数值,而是使用下方滑块进行倍数调整,更加直观简洁。模式一般选择RP即可,此时滑块的移动是同时调节ROLL轴和PITCH轴的PID参数。
滑块是某几个参数的组合和比例,翻译有点难以理解,前五个参数是对上方模式中所选轴的同时调整,其中第二个P&I增益调整的是P与I的比例,第五个可以单独调I,I不动时,调大P&I,P值就会增大。
第六个调节的是Pitch轴的阻尼,其值基于Roll轴的值与比例得来,也就是前五行的调节得来。
第七个调节的是Pitch轴的P、I、FF,其值基于Roll轴的值与比例得来,也就是前五行的调节得来。
关于主乘数方面,它的调整体现在对飞机的整体的控制力的调节,对于动力较弱,质量较大,或者说推重比较弱的飞行器,高一点的主乘数是有意义的选择,对于动力过剩或者动力强劲到不太好操作的飞行器,可以考虑降低主乘数。
各个滑块的解释
PID调整方式
一般流程
调整顺序:D——>P——>I
- 在滤波已无重大问题的前提下,把FF和动态阻尼D Max这些动态参数先设为0,只调静态情况。
- I增益也设为0,此时P&I滑块只影响P。
- 以0.2为步进逐渐增大D值,直到电机发热,此时将D稍微降低到不发热,即为最大D值
- 以0.2为步进逐渐调高P值,直到不过冲,且曲线上升较为迅速。
- 在大部分情况下,此时曲线大致趋势已经比较合理
- 若有轻微过冲,则适当增加动态阻尼D MAX
- 若曲线在后段低于1,则适当减小固定D值;若曲线在后段高于1,则适当增加固定D值。
- 此时曲线可能有较多波动,以0.3为步进调整I值,选择有较为完美的曲线对应的I值。
- 最后根据手感和延时调整FF前馈。
参考
透彻理解穿越机PID原理 底层逻辑和调节方法_哔哩哔哩_bilibili
BetaFlight 4.3调参指南 PID
最直观的PID讲解 原理+实机演示 真·小学生也能看懂_哔哩哔哩_bilibili
使用自稳模式进行PID室内调参_哔哩哔哩_bilibili
穿越机betaflight4.5 PID调参常规流程_哔哩哔哩_bilibili
评论区