一、模拟飞行
受制于天气条件等,我们并不是任何时候都有外场实飞的条件,同时考虑到对新功能、新航线的验证可能存在一定风险,所以在实飞前进行地面站模拟飞行是有必要的。
因为写了一个接收飞控 MAVLINK 消息的小工具,但是不实飞又无法测试软件接收消息的效果,就想到在地面站模拟飞行并转发 MAVLINK 消息出来给自己写的工具。
基本流程:点击 MP 地面站上方的“模型”按钮——>根据需求选择下方的载具——>等待下载完成——>自动进入模拟状态——>去飞行计划规划航线、写入航点——>去飞行数据界面——>解锁——>下方动作界面执行 Mission_Start 开始模拟飞行
参考教程
ArduPilot飞控之Mission Planner模拟飞行 保姆级教程
Mission Planner Simulation
二、MAVLINK消息转发
MP 地面站从数传接收到的 MAVLINK 消息,可以通过 TCP、UDP 和 Serial 串口的方式转发出去,以供本地或局域网内的其它软件使用,以避免 MP 地面站占用数传端口造成其它软件无法访问数传的问题。
配置方法
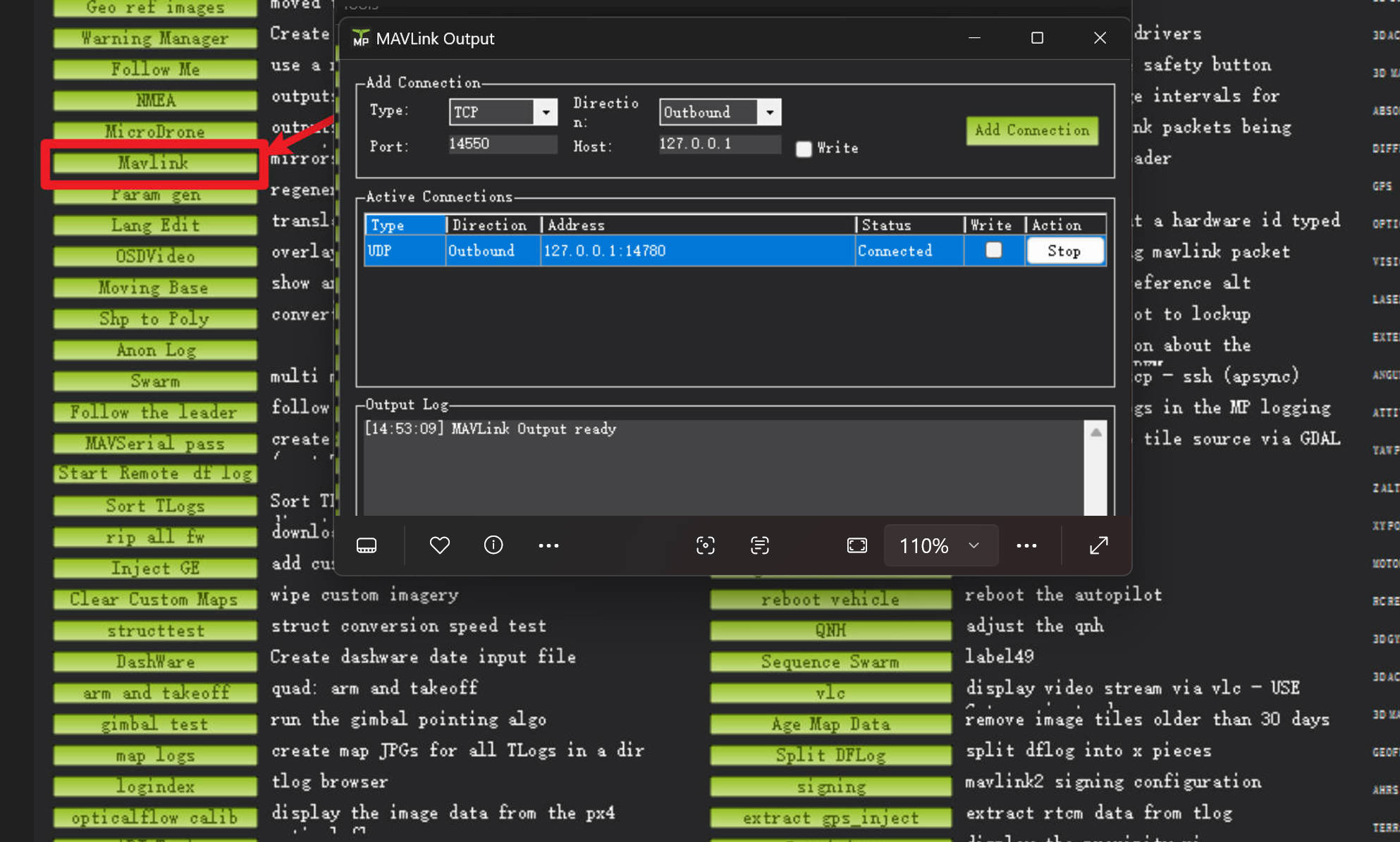
- 在地面站主界面按 CTRL + F 调处高级工具,在左侧一栏中选择“Mavlink”
- 在弹出的 Mavlink Output 界面,TYPE 选择“UDP”,Port自定义,Direction 选择 Outbound,Host 选择 127.0.0.1 转发到本机。Write 若勾选,则允许 UDP 接收方写入 Mavlink 消息给 MP 地面站。
- 配置好后点击右边绿色按钮“Add Connection”即可开启 UDP 广播,在本地其它软件访问相应地址和端口即可接收到消息。
评论区