首页
分类
电子/嵌入式
DIY
航模
路由/NAS
建站
笔迹
书架
归档
友链
留言
关于
静水流深
静水流深,沧笙踏歌
累计撰写
54
篇文章
累计创建
0
个标签
累计收到
43
条评论
栏目
首页
分类
电子/嵌入式
DIY
航模
路由/NAS
建站
笔迹
书架
归档
友链
留言
关于
目 录
CONTENT
静水流深
最新文章
2026-03-09
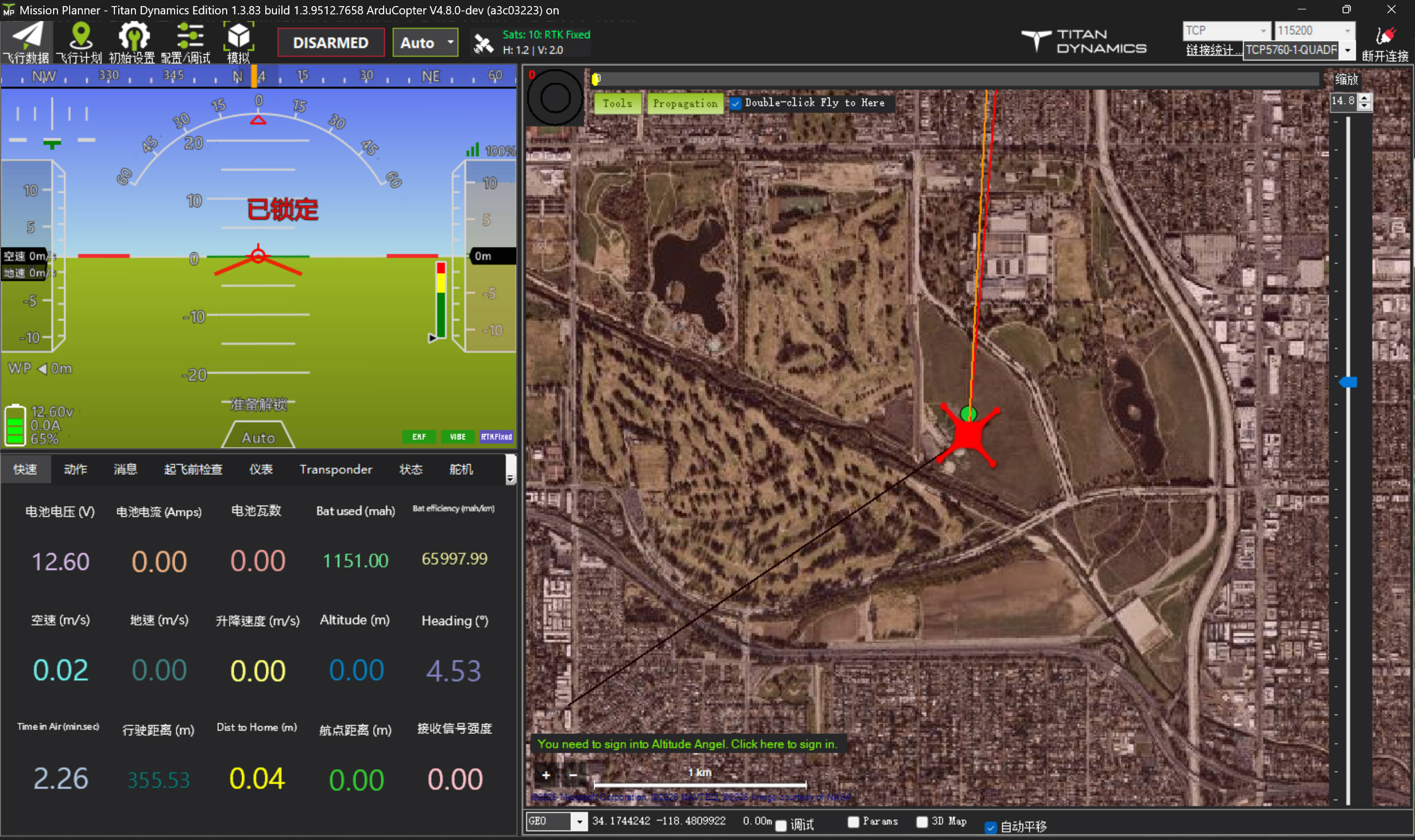
Mission Planner地面站模拟飞行和MAVLINK消息UDP转发
一、模拟飞行 受制于天气条件等,我们并不是任何时候都有外场实飞的条件,同时考虑到对新功能、新航线的验证可能存在一定风险,所以在实飞前进行地面站模拟飞行是有必要的。 因为写了一个接收飞控 MAVLINK 消息的小工具,但是不实飞又无法测试软件接收消息的效果,就想到在地面站模拟飞行并转发 MAVLINK
2026-03-09
23
1
0
航模
2026-02-04
Ardupilot设置MSP协议OSD
天空端使用 RunCam WifiLink 2,飞控适用 Ardupilot 4.6.3 固件,天空端在使用 OpenIPC 固件和 RubyFPV 固件时本设置都适用。 以串口 UART8-Serial8 为例 1. 设置串口参数 设置串口协议为 MSP DisplayPort SERIAL8_P
2026-02-04
17
0
0
航模
2026-01-28
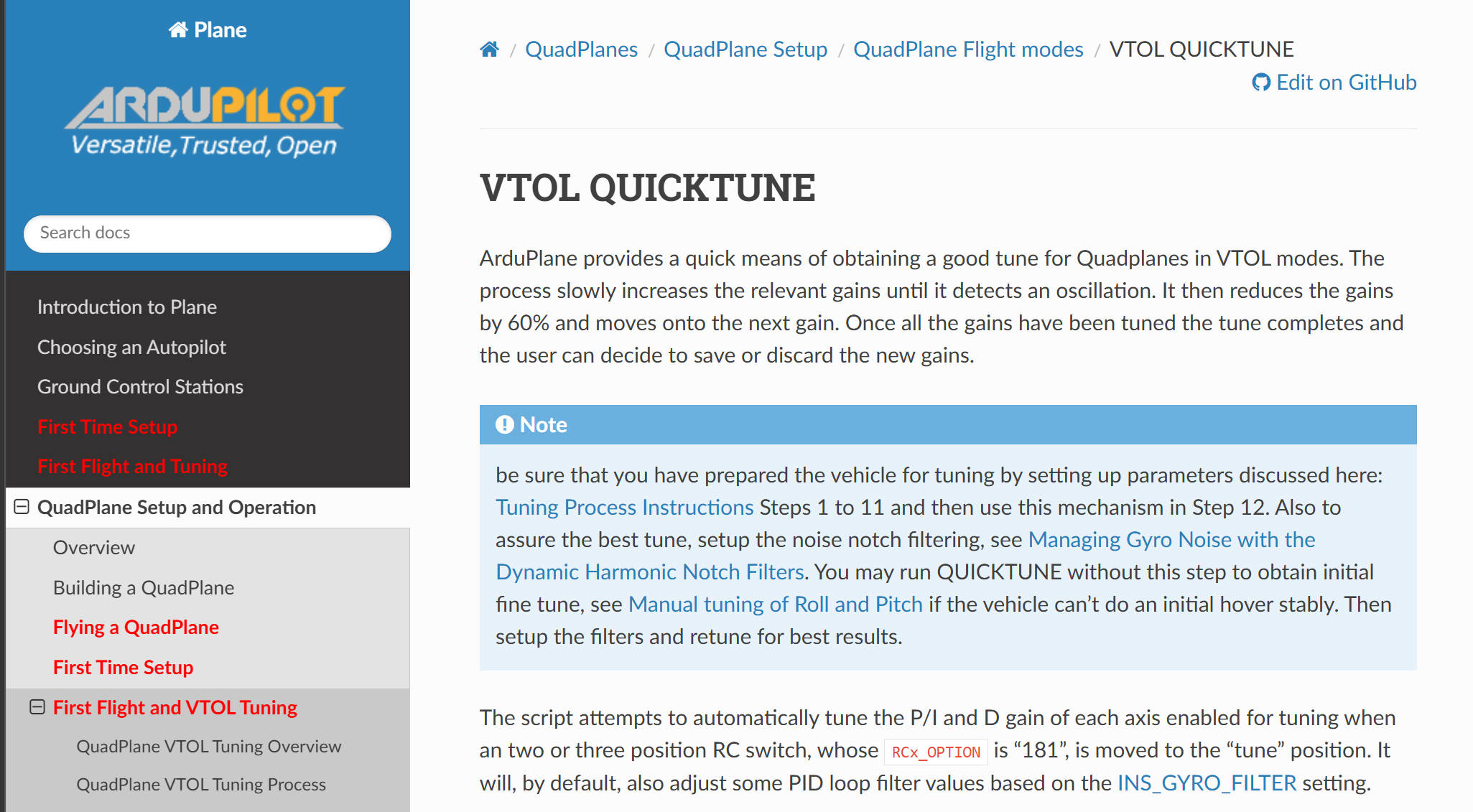
ArduPilot VTOL QuickTune 快速自动调参记录
ArduPilot 固件的垂起模式自动调参有两种类型,分别是QUICKTUNE 和QAUTOTUNE,现在 QAUTOTUNE 已经不再推荐使用,且大多数固件中也未编译,此处只介绍 QUICKTUNE。 在 4.6 之前的 Ardupilot 固件中,要使用QuickTune 需要将VTOL-qui
2026-01-28
33
1
0
航模
2025-07-13
从森林走向森林
今天与朋友前往距市区八十多公里的一处山区游玩了一番,经典的岭南地貌,山高谷深,地势险峻,好在开发的还不错,有盘山公路可以直达山顶。这是一处国家级自然保护区,不同于其他商业气息浓厚的景区,尽管做了必要的开发与布置,但还是很大程度上保留了自然景观原先的样子,一路上林木繁茂,云雾缭绕,置身其中可以真切的感
2025-07-13
144
2
1
笔迹
2025-07-01
1Panel添加群晖Webdav作为备份账号
以前就发现1Panel可以添加Webdav作为备份账号,就在想能不能添加群晖的Webdav,后来太忙就放一边了,于是一直手动备份服务器的快照,但是服务器带宽太小了,一个多G的快照文件,要先下载下来再上传到群晖,十分麻烦。于是决心研究一下。 找到一篇文章 1panel添加群晖webdav作为备份账号-
2025-07-01
269
2
0
路由/NAS
2025-06-07
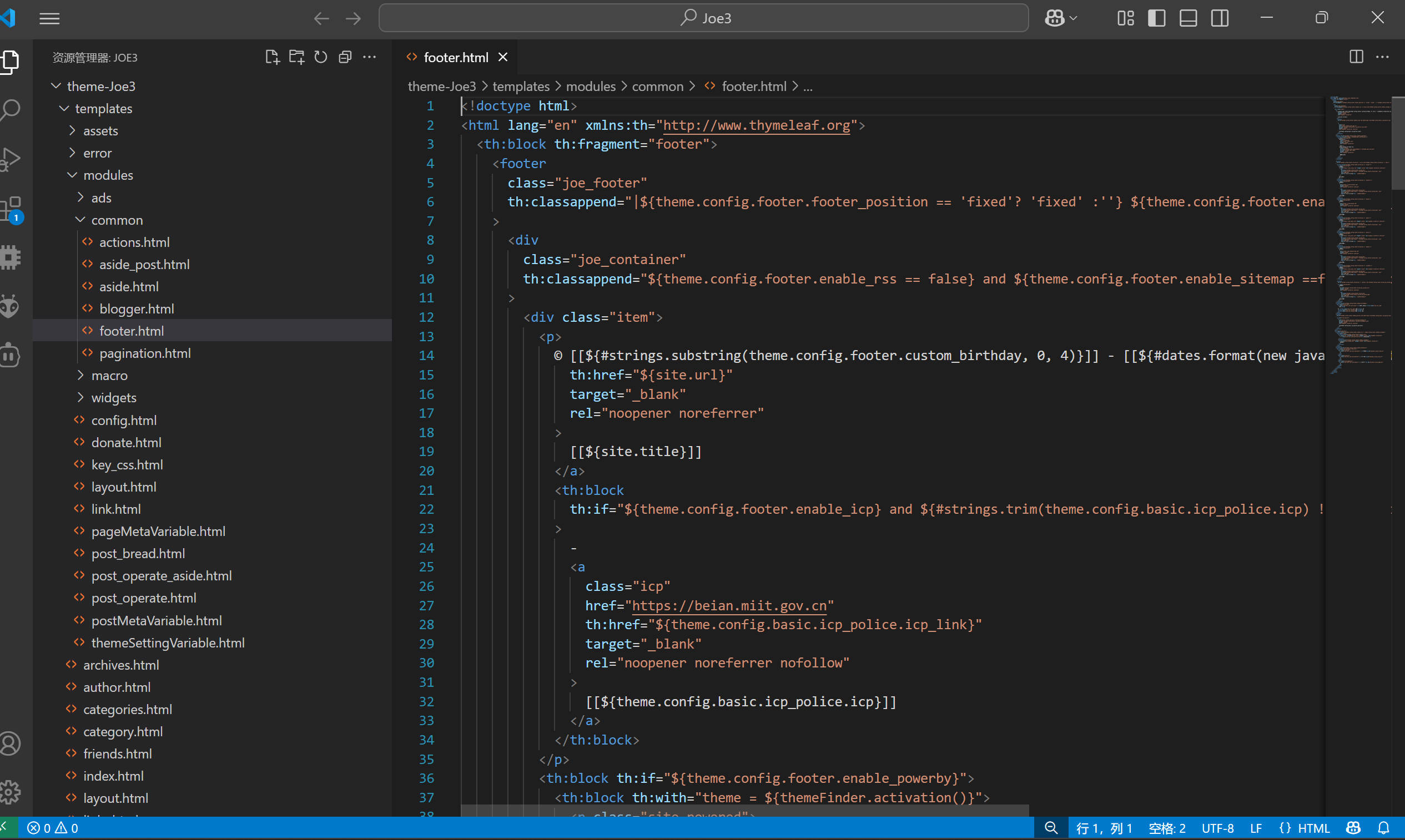
Halo—Joe3主题添加页脚信息
参加云服务商的活动,要求在博客添加外链,在后台主题设置的代码注入中添加代码没有正常显示,于是直接去修改主题文件了。 添加文字链接 <a target="_blank" href="https://langlangy.cn/">浪浪云</a> 添加图片链接 <a target="_blank" hr
2025-06-07
209
3
2
建站
2025-06-01
【转载】调试的本质:从混乱到有序,产品状态逐步确定
调试的本质:从混乱到有序,产品状态逐步确定 ” 调试是一种思维方式,更是一套系统方法。从工程现场的混乱无序,到建立可复现的模型,从“尝试”到因果验证,我们在不断地将不确定因素转化为确定性。“ 简单的项目调试可能依赖于经验、巧合和试错,总能把项目调试好,但是复杂的项目就需要要一套科学严谨的流程和规范,
2025-06-01
105
0
1
电子/嵌入式
2025-05-25
STM32定时器—定时周期测试例程
此代码用于测试定时器的定时周期 写在定时器中断回调函数中 void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { if (htim->Instance == TIM5) { static uint32_t last_t
2025-05-25
101
0
0
电子/嵌入式
查看更多